GAMES101-14:Whitted-Style 光线追踪(2) 包围盒求交的速度优化
前言
GAMES101-14: AABB 包围盒的加速方法:均匀网格、KD-Tree 划分、BVH 划分
均匀网格(Uniform Grid)/均匀空间划分
思想/步骤:
建立一个大的 AABB 包围盒包围对空间中的所有物体,包围盒划分成均匀的若干立方网格;
每个网格判断与物体(的表面)是否相交并记录;
光线穿过空间中的若干网格,如果穿过的网格是一个与物体有交点的网格,那么光线与物体就有可能有交点。此时,对物体进行求交操作;否则,不进行求交。
光线穿过网格的算法和光栅化中的扫描线算法是类似的
网格划分的疏密问题
- 太稀疏:加速效果不明显;
- 太密:引入太多无效的网格判断,效率降低;
- (三维空间)合适的格子数:约等于 27 * 物体数。
网格划分思想适用于大量尺度接近的物体均匀分布在空间中的情况,不适用于空间分布很不均匀的情况(局部引起太稀疏的问题)
空间划分(Spatial Partition)
均匀空间划分的明显问题在于:如果空间分布疏密不一,在大块空的地方做了许多没有必要的划分。如果对空间进行不均匀的划分那么性能就会更好。
下面例举三种划分结构:
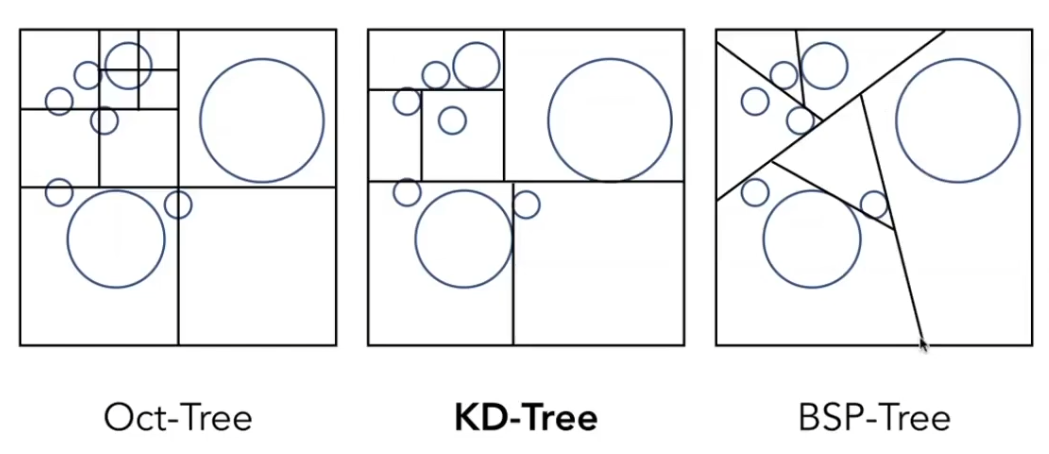
- Oct-Tree(八叉树):把三维空间划分为八份(二维则是四份),如果一块中有物体,则尝试划分得更小,否则就停下这一块的继续划分。 > 这种划分方式的问题在于,划分数量与空间维度有关,不同维度的空间会形成了不同的数据结构。
- BSP-Tree:从不同方向用线/平面/超平面二分空间。这种方式高维难以计算且破坏 AABB 的简单性。
- KD-Tree:每次沿一个维度切一刀,例如三维空间就可以依次沿 x,y,z 轴切,二维则沿 x,y 轴切,从而使划分与空间维度无关。最后会形成一个二叉树。
这一部分与多媒体数据课在向量空间归类的思想很相似
KD-Tree
为树设计的数据结构应该:
- 在内部节点上:
- 划分轴:此结点应该被哪个轴划分
- 划分位置:轴在哪个位置坐标划分
- 子结点指针
- 不存储内部有哪些物体
- 叶子结点:存储内部有哪些物体
当光线进入一个空间划分区:
- 如果该区域有交点,那么检查是否是叶子结点
- 是:检查是否与内部物体有交点
- 否:检查与哪个子划分有交点
- 和该区域无交点:什么都不用做
不过,KD-Tree 也有自己的问题,如:
- 难以判断三角形与空间盒的相交情况:例如一个小盒子,三个顶点都在盒子外但是面与盒子有交集的情况。
- 一个物体可能会被划分到多个盒子里,多次检测。
物体划分:BVH(Bounding Volume Hierarchy)
BVH 的特点在于是按物体而非空间进行划分,对于一个包围盒,递归地将其划分为子空间并计算子空间的子包围盒的边界。重复这个过程,直到盒子足够小(例如大致都有 x 个 物体)即可。数据结构上,同样是叶子结点存物体的树。
划分维度上可以有许多技巧,例如类似 KD-Tree 的依次轮换维度,或者每次从盒子最长的维度划分;抑或着每次从中间物体的位置划分。总之,应该尽量让空间划分均匀。
存在O(N)算法找到中位数,快速选择算法。
需要注意,由于是按物体进行划分,从空间上来说,包围盒之间可以相交。
跳转
Home:GAMES101-1:课程总览与笔记导航
Prev:GAMES101-12&13:Whitted-Style 光线追踪(1)
Next:GAMES101-14&15:辐射度量学