读论文DouZero
前言
在 DeepSeek 的帮助下,读论文DouZero: Mastering DouDizhu with Self-Play Deep Reinforcement Learning,利用蒙特卡罗方法和深度强化学习实现的斗地主 AI DouZero。 顺便试试新安装的 Mermaid 渲染插件。
一些背景
为什么强化学习可以解决斗地主问题?
在本科时接触到的监督学习中,AI 是通过阅读大量的数据,来学习哪些是正确的操作,那些是错误的操作。在这个概念上,又细分出了完全监督、弱监督、无监督,分别指代数据集完全被标注好、数据集标注有误或不完全等、AI自行归纳打标签等情况。但是,总的来说它们都是从静态的数据中进行学习,然后针对环境给出一次反馈就行了。
但是在游戏等互动环境中情况并不是这样的,AI 每进行一次操作,环境就发生一次改变。监督学习总不可能针对每一种情况对进行训练,那完全不切实际。而这就是强化学习所试图解决的问题。如下图所示
graph TB
AI--①执行动作-->环境
环境--②改变 AI 所处的状态-->AI
环境--③给予 AI 动作的奖励-->AIAI会不断给出动作,然后环境告诉 AI 发生了什么变化,AI 因此获得什么奖励。AI 的目标是追求奖励最大化。
见参考 3,蘑菇书第一章。
在斗地主中,玩家不断地丢出手牌(动作),对手也会据此打出自己的手牌(状态变化),直到有人手牌率先打光,就赢了(奖励)。这正是强化学习的逻辑。
强化学习此前在斗地主中面临了什么问题?
DouZero 团队指出,斗地主有非常大的状态空间和动作空间,而此前的 RL 研究主要关注的还是情况更简单状态空间更小的情况,如蘑菇书第一章图1.25提到的OpenAI Gym库中内置的这些小游戏:
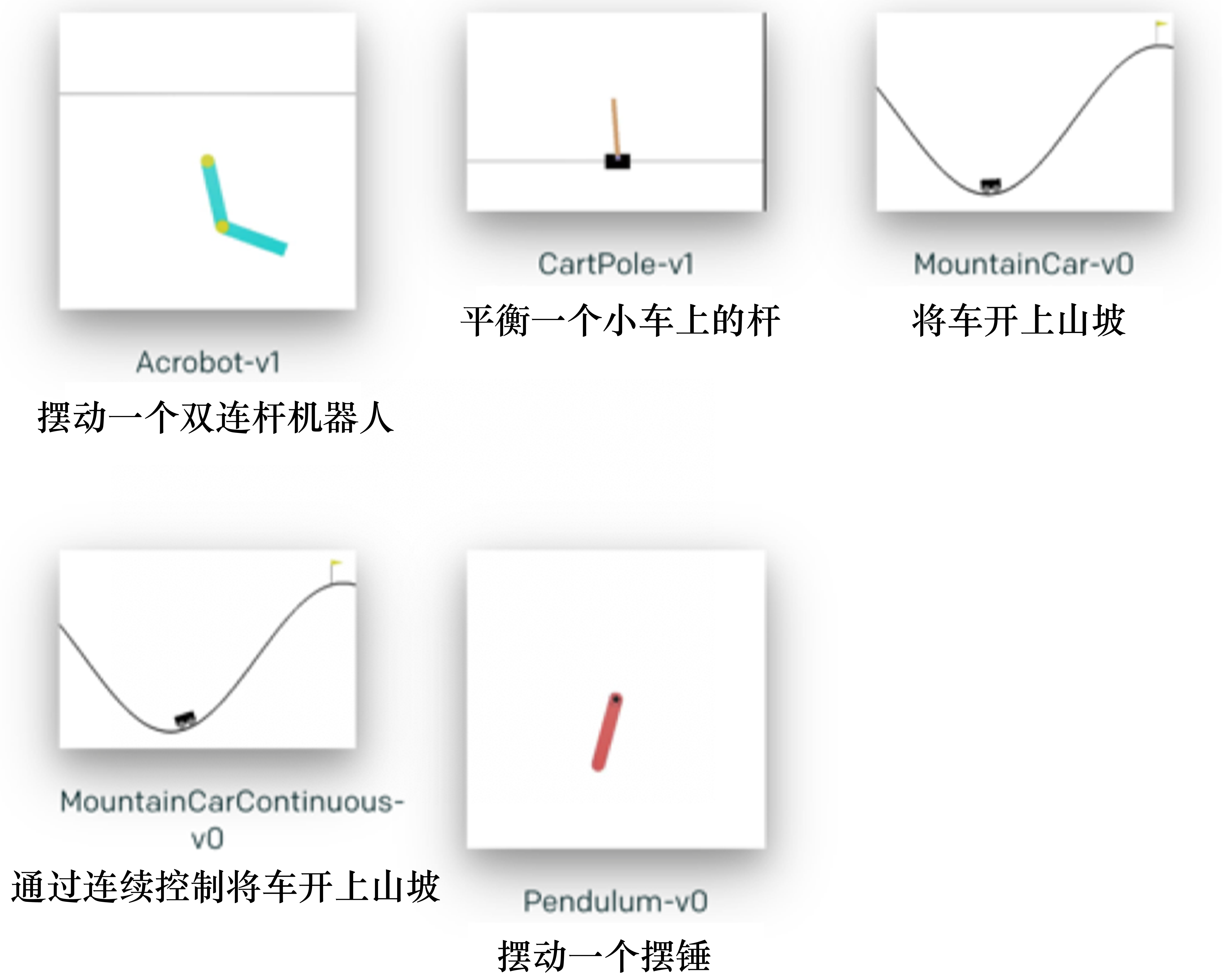
不仅如此,斗地主还需要同时讲究配合(农民和农民)和对抗(农民和地主),而且需要非常多步才能决出最后的胜者,这些特点都需要针对性的处理。综合考虑这些特性,Douzero 团队提出了 Deep Monte-Carol(DMC) 方法,即神经网络来生成蒙特卡洛动作。他们指出,相比于策略梯度方法,DMC 可以更好地利用已知动作去推断未知动作的奖励状态(例如, K 带 3 如果是一个有奖励的操作,那么可以猜测 J 带 3 也是一个不错的操作)。而相比于 DQN(Deep Q-learning), DMC 不仅能更轻松的处理这么大的动作空间和长游戏步骤,价值估计还是无偏的。因为 DMC 采用的是蒙特卡洛方法,而 DQN 中有取最大值的操作,因此会有些偏高。
当然,蒙特卡洛方法作为一种简单暴力的算法,它也有它的不足,那就是随机采样的结果太多样了,需要较多的采样次数才能收敛,因此往往并不高效。但是 DouZero 团队相信,通过并行训练的手段,DMC 可以快速采集样本,从而解决大量采样耗时长的问题。
DouZero的算法逻辑
通常在 RL 中使用蒙特卡洛算法过程如下
- 初始化。有一个值为零的价值表 表;有一个随机生成的策略 指示在给定状态 下需要采取的动作 。、
- 生成一场对局(episode),其中玩家使用的策略是 ,得到的回报是 。
- 把对局中的状态动作对 的 表值依据 更新。例如多局游戏中都有这个状态动作对时,对得到的多个 取均值.
- 更新策略。策略,即策略更新采取为 状态下采用 表中该状态下价值最大的动作 。
当然,我们无法直接应用到斗地主问题上————那样的话这篇论文也就不需要存在了。研究者对算法做了一些修改以适应问题需要,具体来说包括:引入神经网络代替 Q 表、对牌型编码、设计并行的演员采样机制。
首先,由于斗地主的状态空间很大,维护一个巨大的 表不现实。而且前面提到的泛化也无法实现,因为 K 带 3 和 J 带 3 显然是两个格子里的值,表无法体现出二者在状态空间中的相似性。因此 DouZero 中将 表换成了 神经网络。
Q 网络接收动作和状态,然后告诉我们对应的 Q 值。这样,我们就需要将动作和状态进行编码,并且定义哪些信息是状态。
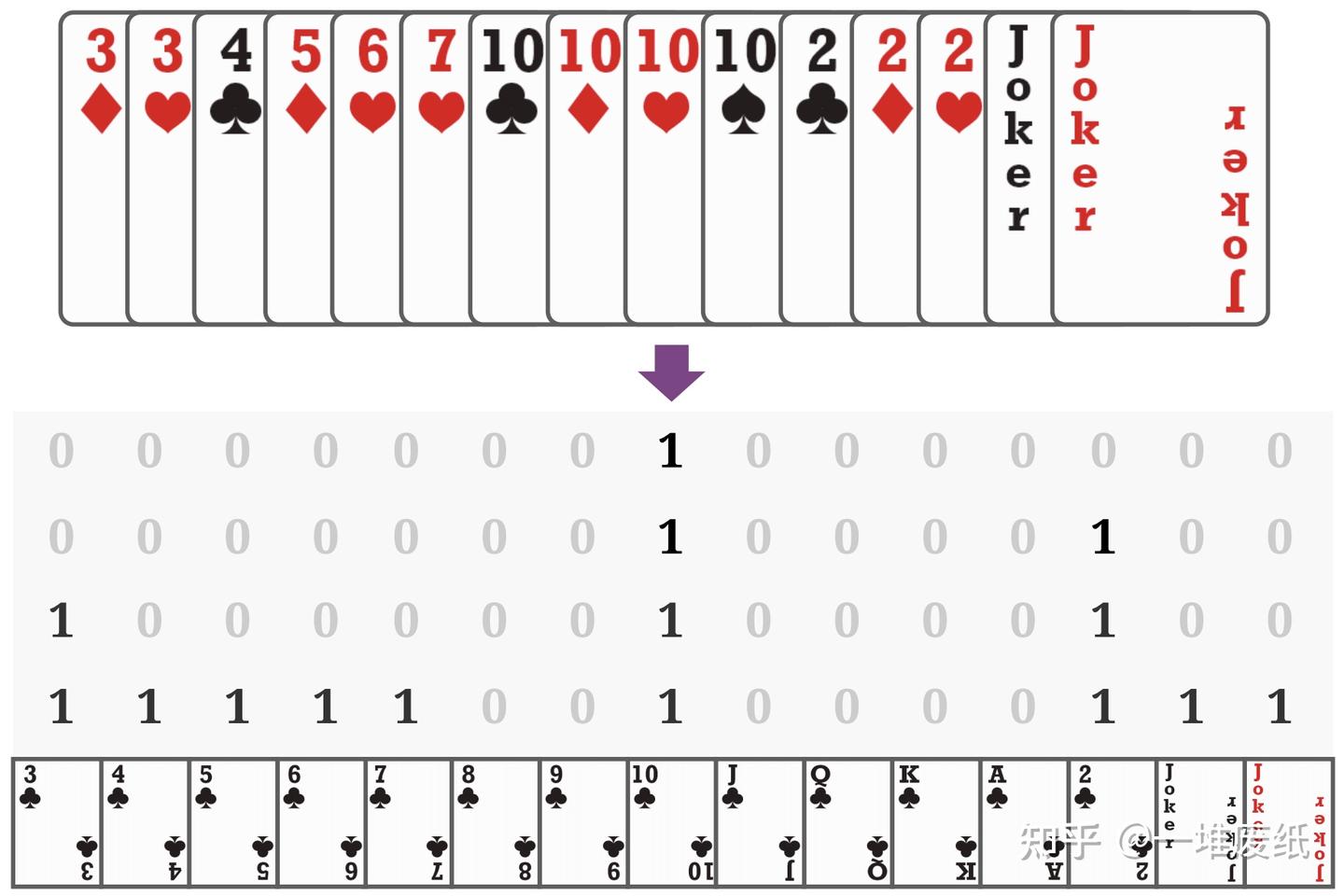
此外,我们还需要将动作和手牌等编码为一个 的矩阵如下,其中的 0/1 值代表是否包含这张牌。
而我们给网络输入的状态信息则如下,其中包括牌桌上可以观察到的信息的编码,也包括历史出牌信息的编码。对牌桌上可以观察到的信息(例如另外两家余下的手牌,已经出的牌等)编码和上面的矩阵自然是一样的。历史出牌信息则通过 LSTM (长短时记忆网络)进行编码。
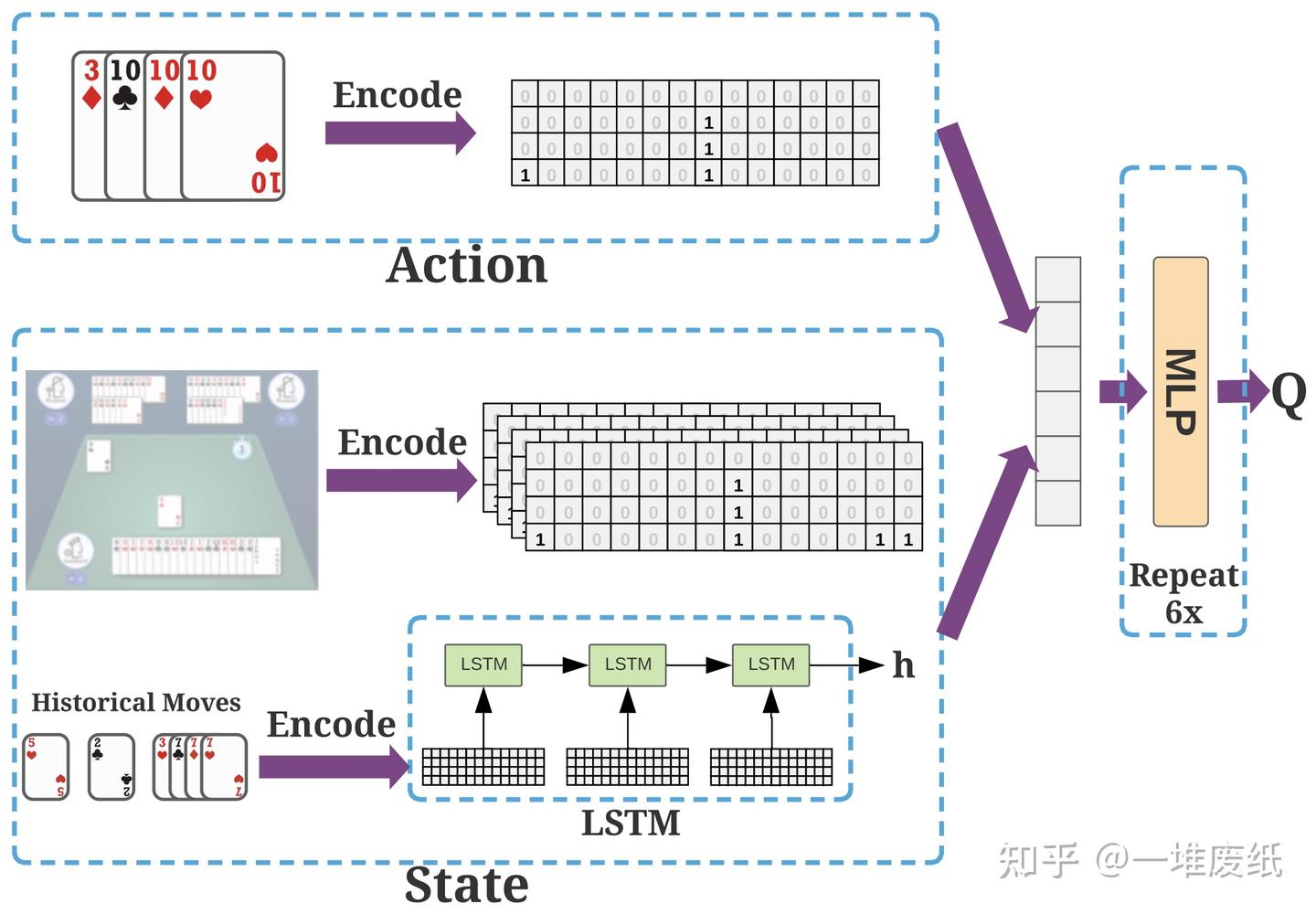
上图还告诉我们,Q 网络是一个六层的 MLP(多层感知器) 结构,或者叫全连接网络,因为 MLP 中每层都全连接到下一层。
第二步中我们还需要更新 Q 网络。这里,DouZero 采取了 MSE(Mean Square Error)方法,即均方差损失,它的公式如下
其中真实值()为实际交互得到的回报值,预测值()为 网络给出的当前动作状态对的 值。
更具体地,在实现上,训练被分成了两个大逻辑板块。
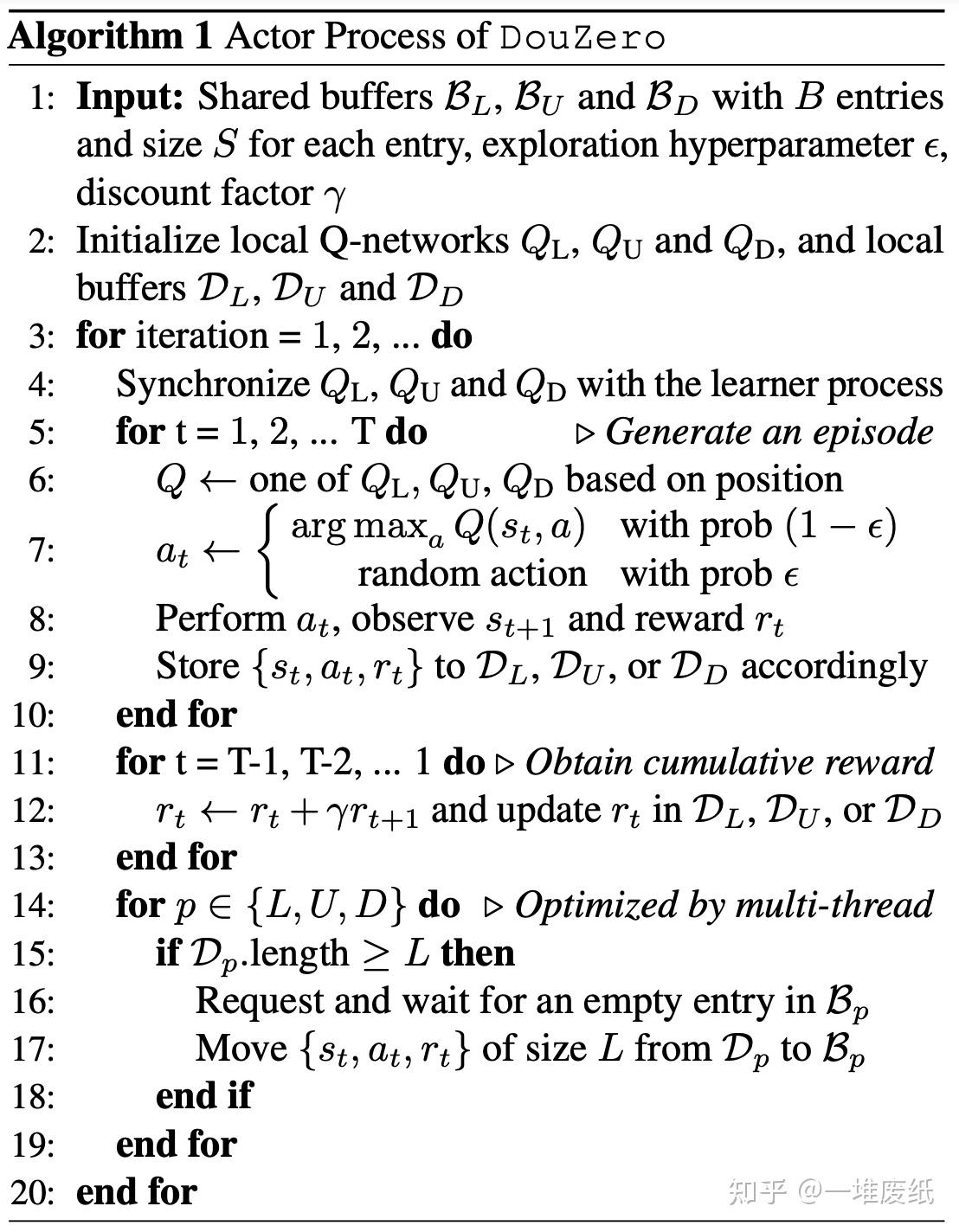
第一个是 执行器 (Actor) 的逻辑,它负责第 0 步和第 1 步,即玩游戏采样数据并写入一个共享缓冲区中。如前所述将斗地主中的三人命名为 L(地主,landlord)、U (地主上家,Up)和D(地主下家,Down)。那么每局游戏中都在同时训练三个位置上的 Actor。它们被一定程度地区隔开来以免互相影响,并且如前所述,采用多线程同时让多个 Actor 采集数据加快速度。Actor 的逻辑如下。
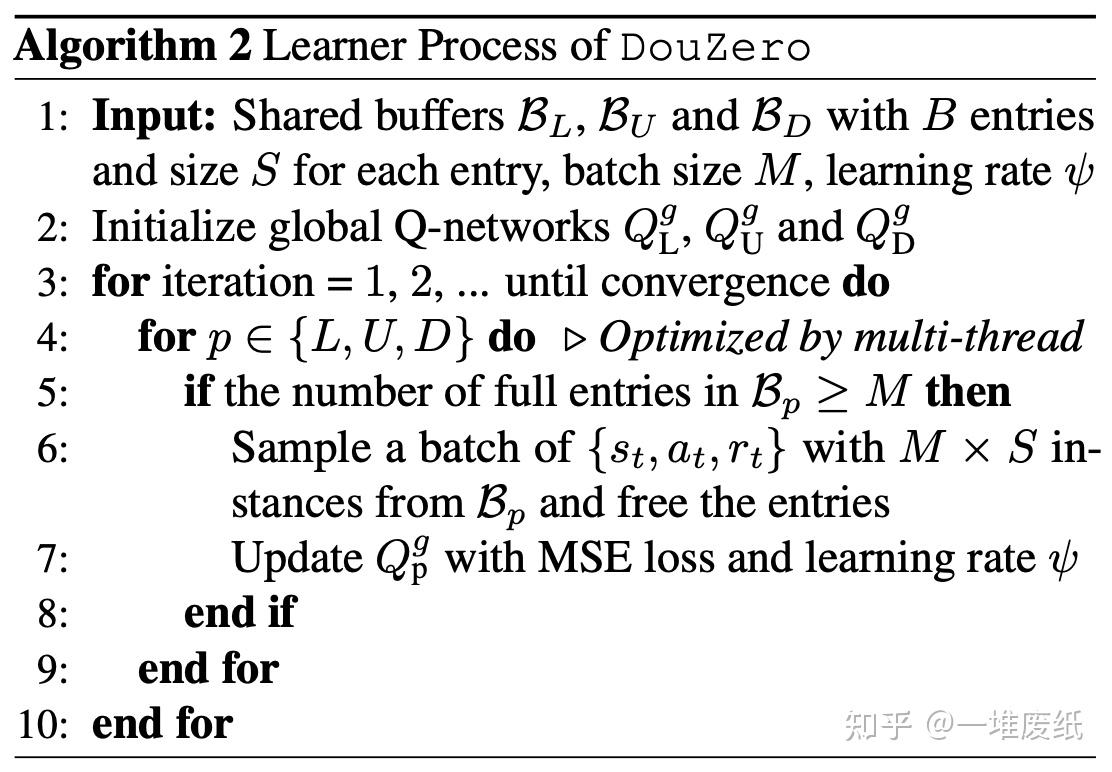
第二个就是 学习器(Leaner) ,它负责第 3 步和第 4 步。即不断从缓冲区中提取数据,学习并更新 Q 网络。
读代码
上面这些其实算是对论文和对应知乎专栏文章的复读。下面对应读代码解析。
train()
由 train.py 进入 dmc.py 中的 train() 函数是主函数。它首先根据参数(flags)确定有多少可供 actor 训练的设备(devices),并对应初始化数据结构。如果 flags 中有要求导入模型并继续训练,还需要导入对应的训练检查点(line 61 - 144)。
初始化的数据结构中有以下比较重要:
- position: 一个字符串,表示玩家的身份:地主(L)、地主上家(U)、地主下家(D)。
models: 一个字典,包含device个Model结构,Model 中则对应存储了三个位置(L、U、D)的模型等信息。这是给actor用的。buffers[]:缓冲区,即actor写入,learner读出的共享数据区。大小为devices*position(L,U,D) 个。learner_model:顾名思义,给learner用的模型。运行在flags中指定的training_device上。locks,position_lock:线程锁,locks共devices* 3(L/U/D)把,用于锁定actors写入的buffers;position_lock共 3 把(L/U/D),用于锁定learner_model的对应position。free_queue和full_queue:buffers状态指示。由于各actor和learner都属于不同线程,所以我们需要锁保证通信的稳定。free_queue标识了那些空闲的 buffer 区,full_queue标识了被填满的那些 buffer 区。一度以为是表示“全部的buffer”,但是这里 full 取的是“满了”(have been filled)的意思
随后,程序启动 devices * num_actors 个 actor 线程,即同一个 device 下有 num_actors 个 actor 使用同一个 model 进行游戏。
1 | # Starting actor processes |
当然为了让 actor 有地方可写,我们需要先给 free_queue 中放入一些位置:
1 | for device in device_iterator: |
然后我们启动 个 learner 线程,即同一个 device下每 num_threads 个线程里,都有 3 个(position 个) learner 针对不同的 position 学习。他们的的学习结果更新到唯一的 learner_model 中不同的 position 上。
1 | for device in device_iterator: |
最后,调用 checkpoint 函数输出检查点。
在解析代码之前,我们还需要先解释代码中观察到信息(obs)的命名,以便于后续的理解:
z: 最近 15 步历史移动信息。由于三家各走一步为一轮,所以编码是 而不是 。x_no_action: 一堆特征,其中既没有动作特征,也不包括历史信息。x_batch: 一批次的特征,其中包括动作特征,不包括历史信息。z_batch: 被拓展为一个批次的历史移动信息。legal_actions: 合法的动作。
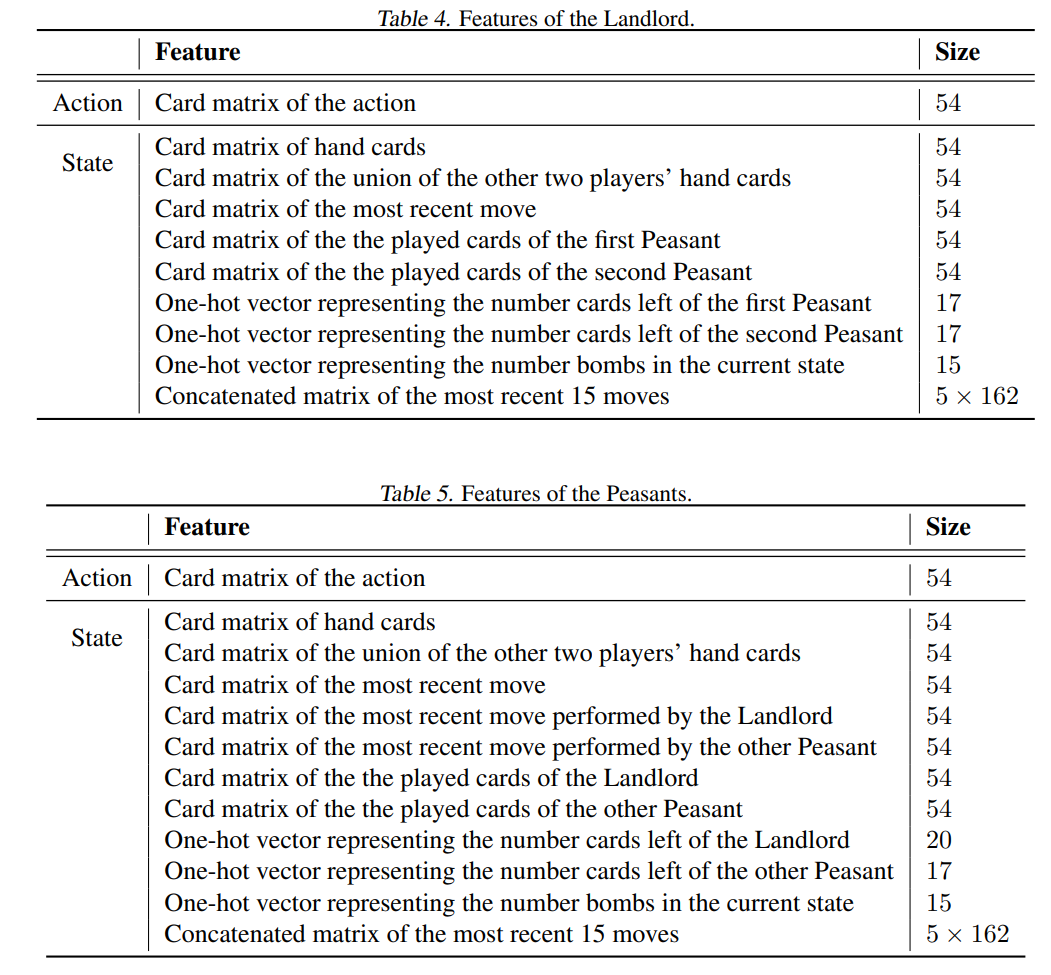
由上表可以看出,x_no_action + z 就是我们所谓的 state。
所谓批次(batch)就是一堆同类的信息(或者更严谨的说,一堆独立的样本)。但是我们哪来一堆同类的信息?其实,一个批次里,每个样本都是一致的信息,以玩家手上的手牌为例:
1 | def _get_obs_landlord(infoset): |
可以看见手牌的批次只是将手牌重复了 num_legal_actions 次。其实,之所以要拓展为批次,是为了在当前的 state 下,并行计算评估所有合法动作的价值,从而找出最有价值的动作。因此,也就需要将所有的 state 信息拓展为 num_legal_actions 个。因此,动作特征的批次就并不一样:
1 | def _get_obs_landlord(infoset): |
act()
act 函数是 actor 逻辑运行的地方。它会首先创建游戏环境(Environment),然后在这个环境下利用模型预测不断出牌,直到决出胜者,然后将这个过程中产生的数据传输到 buffers 中。随后,它再开一局新游戏,不断重复上述过程,直到我们打断它。如下图所示,其中粗线表现 act() 中的流转,细线表示该步的内部细节。
graph TD
GameEnv(GameEnv: GameSimulator)
Env(Env: multi-agent wrapper. *get reward, check finished, get_obs*)
Enviroment
predict(model predict)
act(act func)
subgraph step
direction TB
Enviroment --> Env --> GameEnv
Env-->env_step
end
subgraph env_step
direction TB
check_legal --> GameEnvStep("do GameEnv.step()")-->get_obs_landlord(get imperfect info from infoset by position)-->get_reward("get reward when game end(+ for lanlord win,- for peasant win)")
end
subgraph forward
direction TB
Models.forward --> LandlordLstmModel.forward-->epsilon_greedy
Models.forward --> FarmerLstmModel.forward-->epsilon_greedy
end
act==> predict ==> performe(performe action)
performe-->step
predict --> forward预测出牌:forward()
前面的流程图中,forward 就是利用模型生成 action 的步骤。当然,如## DouZero的算法逻辑 一节的图所示,我们需要输入一些参数。简单来说,act() 调用 model 中的 forward() 函数获得数据,并对应更新 buf。如下所示
1 | def act(...) |
model.forward() 根据 position 决定调用 LandlordLstmModel(地主)还是 FarmerLstmModel(农民)。它们的 forward 函数将一系列参数输入 Q网络(六层全连接)得到结果,并经历一次 得到结果。
1 | class LandlordLstmModel(nn.Module): |
执行操作:step()
在这一步中,actor(或者说 act())将 forward() 中确定的 action 编码并放进游戏中执行。
1 | def act(...) |
env,即游戏环境,如前面的 act() 流程图 所示,在源代码中共有三层,从顶到底分别是 Environment,Env 和 GameEnv。
最底层的 GameEnv 是纯粹的游戏模拟逻辑,它根据 action 更新玩家手牌、指定下一个玩家出牌的玩家、判断游戏有没有结束、收集场上信息(infoset)……如下:(有简化)
1 | class GameEnv(object): |
Env 是 GameEnv 的一层抽象。使用它的目的是“分离玩家和游戏,让接口更有 OpenAI Gym 的风格”(class Env, def init(),“isolate players and environments to have a more gym style interface.”)。更具体来说,Env 除了将动作传递到 GameEnv 中执行以外,还将 GameEnv 中的完美信息集合(infoset) 变成并不完美的信息集合:显然,每个玩家都不可能观察到别的玩家的手牌,玩家的信息是不完整的。
1 | def step(self, action): |
最顶层的 Enviroment 负责将观察信息通过 CUDA 转化为张量,并在游戏结束时,自动重置游戏。
1 | def _format_observation(obs, device): |
传递信息
最后,完成一局游戏,我们将数据传送到共享缓存中。
1 | for p in positions: |
batch_and_learn()
batch_and_learn 即学习的主函数,这个程序根据 actor 的数据进行学习,并更新 actor 的 model。如下:
graph TB
BL("batch_and_learn()")
L("Learn()")
U("Update():update player model with lock")
Log("Update Log")
BL ==> L==>U
%% L-->Learn
subgraph Learn
handle("handle data")
loss("calculate MSE loss")
backward("backward propagation (calculate grad)")
actor("update actor models")
L-->handle-->loss-->backward-->actor
end
U==>Log在数据处理中,我们首先将观察信息中的 x_no_action 和 action 组合为 x(即 state + action - 历史移动信息)。然后将 x、z、target 都展平,因为我们的网络是全连接的。此外,还计算了游戏的平均回报。
1 | obs_x_no_action = batch['obs_x_no_action'].to(device) |
随后,在加锁以后,我们开始修改模型。
首先,我们通过 MSE 公式计算损失。前面提到,它的公式为:
1 | def compute_loss(logits, targets): |
清除历史梯度,然后计算损失的梯度,并反向传播更新模型。
1 | optimizer.zero_grad() # 清除历史梯度 |
最后,同步到 actor 模型上
1 | for actor_model in actor_models.values(): |
参考文献
- Douzero GitHub 开源代码:kwai/DouZero: [ICML 2021] DouZero: Mastering DouDizhu with Self-Play Deep Reinforcement Learning | 斗地主AI
- 作者中文博文:DouZero斗地主AI深度解析,以及RLCard工具包介绍 - 知乎
- 《Easy RL》,第一章 强化学习基础: 第一章 强化学习基础